Почему мой код прерывания не работает?
Фон
Я пытаюсь написать код для чтения сигналов с шестиканального RC-приемника на Arduino Mega 2560. В настоящее время я сохраняю код для чтения только одного канала, чтобы упростить устранение неполадок. Проблема в том, что моя общая переменная не обновляется, что наводит меня на мысль, что моя процедура обработки прерываний не обнаруживает никаких нарастающих фронтов.
Я думал, что мой приемник сломался, поэтому я проверил его, используя стандартную функцию прерывания присоединения Arduino. Она отлично сработала, так что мой приемник в порядке.
Я использовал Serial.print(), чтобы проверить, обновляется ли моя переменная volatile channel (то есть, изменяется ли ее значение на значение флага канала 1). Она не обновлялась, поэтому моя ISR должна быть неправильной. Вы можете найти исходный код в сообщении в блоге.
Что случилось? У меня нет идей.
#include <PinChangeInt.h>
//Назначение выводов
#define channel1PIN 10
//Битовые флаги
#define Channel1FLAG 1
//Держатель флага
volatile uint8_t bFLAGUPDATESHARED;
//Общие переменные: Доступ к ним осуществляется процедурой обработки прерываний и чтение в «пустом цикле».
volatile uint16_t unCHANNEL1SHARED;
//Переменные времени начала: они используются для установки времени начала нарастающего фронта
// импульс. Доступ к ним возможен только через ISR, поэтому они являются беззнаковыми целыми числами и
//не летучие вещества.
uint32_t ulCHANNEL1START;
void setup()
{
Serial.begin(9600);
Serial.print("RC Channel PWM Read Interrupt Test");
//Функция библиотеки PinChangInt. Используется для установки прерываний присоединения.
PCintPort::attachInterrupt(channel1PIN, calcCHANNEL1, CHANGE);
}
void loop()
{
//Внутрицикловые переменные для хранения локальных копий входов каналов.
//Это статическое значение, поэтому оно сохраняет значения между циклами вызовов.
static uint16_t unCHANNEL1IN;
//Внутрицикловая копия держателя изменчивого флага bSHAREDFLAGUPDATE
static uint8_t bFLAGUPDATELOCAL;
//Проверьте, получили ли какие-либо каналы сигналы. Если да, скопируйте
//общие переменные в локальные переменные цикла.
if (bFLAGUPDATESHARED)
{
//Отключить прерывания при копировании общих переменных в локальные переменные
noInterrupts();
bFLAGUPDATELOCAL = bFLAGUPDATESHARED;
if (bFLAGUPDATELOCAL & Channel1FLAG)
{
unCHANNEL1IN = unCHANNEL1SHARED;
}
bFLAGUPDATESHARED = 0;
interrupts();
}
Serial.println(unCHANNEL1IN);
//Очистить локальные флаги обновления, поскольку все значения были скопированы в локальные переменные
bFLAGUPDATELOCAL = 0;
}
void calcCHANNEL1()
{
if (digitalRead(channel1PIN) == HIGH)
{
//Если вывод становится высоким, запускаем таймер и устанавливаем ulCHANNEL1START на запуск таймера
ulCHANNEL1START = micros();
}
else
{
//Если он не растет, значит, он падает, поэтому устанавливаем общий
//переменная для текущего времени-время начала
unCHANNEL1SHARED = (uint16_t)(micros() - ulCHANNEL1START);
// Сообщаем, что канал 1 получил сигнал
bFLAGUPDATESHARED |= Channel1FLAG;
}
}
@Ozymandias, 👍2
Обсуждение2 ответа
Лучший ответ:
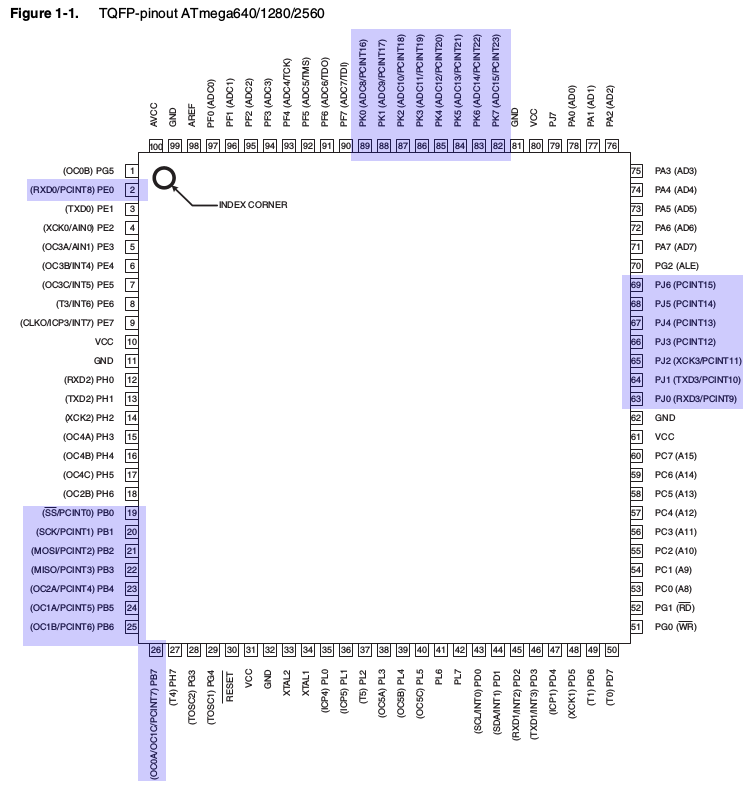
Только некоторые порты на Atmega2560 поддерживают прерывания по изменению состояния контактов, в частности порты B, E (бит 0), J (биты с 0 по 6) и K.
Глядя на референсную схему, можно увидеть, что эти контакты на плате поддерживаются:
Chip
Name Pin Pin on board
-----------------------
Port B
PB0 - 19 - D53 (SS)
PB1 - 20 - D52 (SCK)
PB2 - 21 - D51 (MOSI)
PB3 - 22 - D50 (MISO)
PB4 - 23 - D10
PB5 - 24 - D11
PB6 - 25 - D12
PB7 - 26 - D13
Port E
PE0 - 2 - D0 (RXD0)
Port J
PJ0 - 63 - D15 (RXD3)
PJ1 - 64 - D14 (TXD3)
PJ2 to PJ6 - not connected on board
Port K
PK0 - PK7 - (89 - 82) - A8 - A15
Таким образом, вы можете видеть, что D10-D12, которые, как вы говорите, работают, находятся в этом списке. Других случайных не будет.
Серийный номер ПО
Вы можете увидеть подтверждение на странице SoftwareSerial, где говорится:
Не все контакты на Mega и Mega 2560 поддерживают прерывания изменения, поэтому для RX можно использовать только следующие: 10, 11, 12, 13, 14, 15, 50, 51, 52, 53, A8 (62), A9 (63), A10 (64), A11 (65), A12 (66), A13 (67), A14 (68), A15 (69).
Это связано с тем, что SoftwareSerial использует прерывания по смене контактов для обнаружения входящих последовательных данных, поэтому на этой странице есть отказ от ответственности за то, с какими контактами он будет работать.
Распиновка Atmega2560
PinchangeInt должен работать с любым цифровым PIN-кодом
Обратите внимание, что Atmega328P (используемый в Uno) имеет меньше портов, и все они доступны для прерываний по смене контактов на этой плате.
Этого не может быть. На странице, на которую дал ссылку автор, утверждается, что выводы 2, 3, 18, 19, 20 и 21 можно использовать для прерываний. Согласно https://goo.gl/DvHEUA и https://goo.gl/xAwBGM, они соответствуют выводам PE4, PE5, PD3, PD2, PD1 и PD0. Меня больше интересует, можно ли использовать PORTC, как в ros_arduino_bridge: https://goo.gl/rq6yQO, @tsbertalan
На странице по ссылке упоминаются **внешние** прерывания, однако автор оригинала использует прерывания **по изменению контакта**, как видно из #include <PinChangeInt.h>. Контакты прерывания по изменению контакта — те, что я перечислил., @Nick Gammon
Понятно. Я подозревал, что это может быть различие, но предполагал, что все выводы, способные к внешним прерываниям, также будут способны к изменению выводов, но не наоборот., @tsbertalan
В ATmega1280/2560 только порты B, J, F и K имеют возможность прерывания смены пина. Они примерно соответствуют выводам 10–15, 50–53 и A6–A15 (хотя часть порта J не сопоставлена с выводами Arduino, поэтому PCINT11–PCINT15 недоступны на Arduino Mega/Mega 2560).
- Мега: присоединение Interrupt на выводе 18/19/20/21 не работает
- Управление скоростью вентилятора с помощью библиотеки Arduino PID
- Выводы прерываний Arduino Mega 2560 и отображение портов с помощью поворотного энкодера
- Использование RFID-RC522 с другими контактами
- Можно ли использовать цифровые контакты в качестве выхода ШИМ?
- Несколько кнопок на одном прерывании, как устранить дребезг?
- Изменение ШИМ на Arduino Mega, контакты 9 и 10 на 20–25 кГц
- Возникла проблема с переобъявлением символа другого типа
Попробуйте упростить код. Пусть ISR зажигает светодиод, например. Я не вижу ничего изначально неправильного., @Gerben
Я разобрался. По какой-то причине он работает только на пинах 10,11 и 12. Я не знаю почему. PinchangeInt должен работать на любом цифровом пине, @Ozymandias
Но вы используете пин 10? В любом случае, рад, что у вас все заработало., @Gerben