Расчет частоты таймера для UNO/Atmega328
Я, должно быть, переутомился или что-то в этом роде... Я просто не могу правильно рассчитать частоту таймера. У меня есть кристалл на 16 МГц на Atmega328. Мне нужна частота прерывания таймера 1 кГц. Поэтому я выбрал предделитель = 64 и счетчик = 249, то есть
fTimer = fCPU/prescaler/(top+1) = 16 МГц/64/250 = 1 кГц
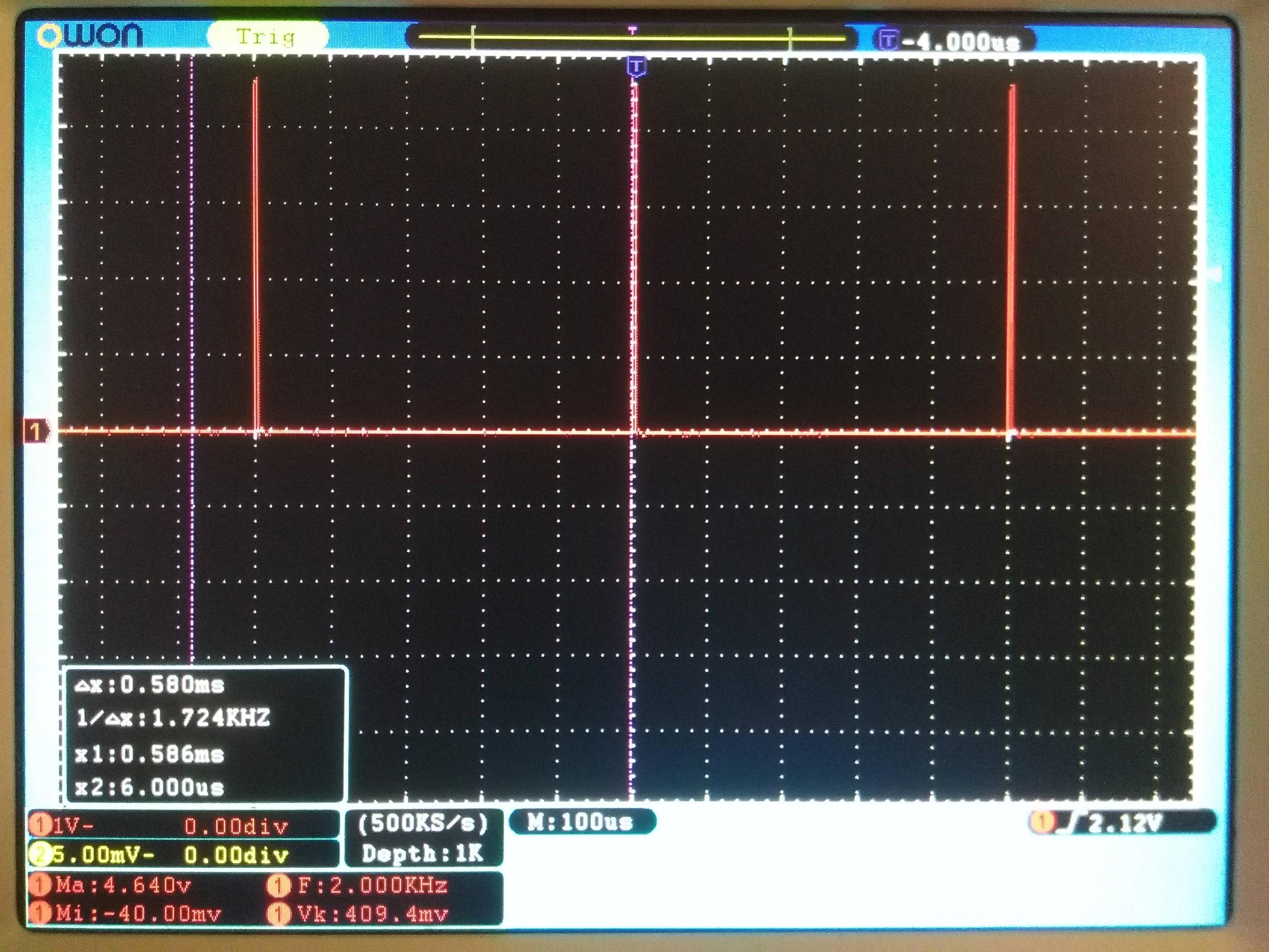
Но мой осциллограф показывает 2 кГц... !? Почему?
Я прочитал Timer2 Compare Interrupt не работает как ожидалось, но принятый ответ не делает ситуацию лучше. Там частота вдвое выше, тогда как у меня она вдвое выше ожидаемой.
Код:
const int signalLED = 1; //14;
void setup()
{
pinMode(signalLED, OUTPUT);
digitalWrite(signalLED, LOW);
TCCR2A = 0; // устанавливаем регистр TCCR2A в 0
TCCR2B = 0; // устанавливаем регистр TCCR2B в 0
TCNT2 = 0; // сбросить счетчик
OCR2A = 249; // верхнее значение в режиме CTC
TCCR2A |= (1 << WGM21); // включить режим CTC таймера 2
TCCR2B |= (1 << CS21) | (1 << CS20); // 1:64 предварительное масштабирование для таймера 2
TIMSK2 |= (1 << OCIE2A); // включить прерывание сравнения таймера 2
sei(); // разрешить прерывания
}
ISR(TIMER2_COMPA_vect)
{
// сгенерировать пик
digitalWrite(signalLED, HIGH);
digitalWrite(signalLED, LOW);
}
void loop()
{
}
@oliver, 👍1
1 ответ
Лучший ответ:
Ваш комментарий:
TCCR2B |= (1 << CS21) | (1 << CS20); // 1:64 предварительное масштабирование для таймера 2
не соответствует фактической настройке (= 1/32)
Также есть некоторые проблемы с настройкой режима Timer2 CTC, лучше установить режим, затем OCR2A + TCNT2 + прерывания, а затем Prescaler для запуска таймера. Он ведет себя так, как будто OCR2A=0, поэтому частота намного выше ожидаемой.
- Использование millis() и micros() внутри процедуры прерывания
- Arduino непрерывно считывает значение АЦП с помощью прерывания
- Использование TIMER0_COMPB_vect
- 4-битный счетчик вверх и вниз
- Включить и отключить отдельные прерывания
- Как настроить векторный таймер прерываний сторожевого таймера на Arduino Redboard/Uno?
- ATtiny85 AC Phase Control для регулировки яркости лампочки
- Присоедините функцию Arduino ISR к члену класса
Вот в чем проблема. Я просто перепутал настройки предделителя Таймера1 с Таймером2. Для Таймера1 CS11|CS10 — это 64. Я знал, что вставать слишком рано мне не пойдет на пользу... ;-), @oliver